
الأستاذ المشرف
د.طارق الناصوري

اعداد الطالب
فهد حسام العجي

اعداد الطالب
فادي منهل الجعط
- الملخص
هدف هذه الورقة هو المساهمة في التقارب بين مجالين مهمين ومستقلين في البحث: ديناميكيات الروبوت المناولة وهندسة الزلازل. يمكن تطبيق بعض منهجيات النمذجة والتحكم، المتعلقة بمشاكل الروبوت المناولة، على حل مشاكل هندسة الزلازل (على سبيل المثال، مراقبة الصحة وتخصيص السلوك التذبذبي). نقدم بعد ذلك مقارنة بين النماذج الرياضية للروبوتات المناولة (سلاسل حركية مفتوحة) في الإحداثيات العامة وتلك المستخدمة عادة في ديناميكيات الهياكل للمباني ذات الارتفاع المنخفض والمتوسط. يتم تقديم أربعة نماذج مختلفة، اثنان يتوافقان مع الروبوتات المناولة، مع أذرع صلبة ومنظومات لينة ومباخر على شكل حلزوني في أطراف الأذرع، واثنان من النماذج المتوافقة مع المباني ذات الأعمدة المرنة والشرائط الصلبة والأغشية الواقية ذات التحركات الجانبية الصغيرة.
- الكلمات المفتاحية:
- نماذج التلاعب الروبوتية (Robotic manipulation models).
- ديناميكيات الروبوت المناولة (Manipulator robot dynamics).
- منهجيات النمذجة والتحكم (Modelling and control methodologies).
- ديناميكيات الهياكل (Structural dynamics).
- المباني ذات الأعمدة المرنة (Flexible column buildings).
- الاهتزازات المحفزة بواسطة الزلازل (Seismically-induced vibrations).
- مقدمة
الورقة الحالية تستند إلى ضرورة تصميم الهياكل المدنية رياضياً، من أجل تطبيق تقنيات كشف الأخطاء من وجهة نظر الروبوتات. الفكرة الرئيسية هي استنباط نماذج مناسبة لهذه التقنيات.
فيما يلي تطوير أربع نماذج رياضية، أي أربع طرق مختلفة لتصور هيكل مدني من وجهات نظر التحكم والهيكلية. في جميع هذه النماذج، يتم تقييد التطوير إلى نظام ذو ثلاث درجات حرية (DOF) على قاعدة منزلقة. يحاول أن يحاكي سلوك مبنى ذو ثلاثة طوابق تعرض لاهتزاز زلزالي. يتم استخدام فلسفة النمذجة اويلر-لاغرانج للحصول أولاً على الطاقة الحركية والطاقة الكامنة . الهدف من البحث هو استنتاج نماذج الروبوت المناولة التي لها سلوك مماثل لتلك النماذج للمباني ذات السمات الهيكلية. سيتم استخدام تلك النماذج الروبوتية التي تمثل بنية المبنى بشكل أفضل مع تقنيات كشف الأخطاء من نظرية الروبوتات، ثم ربط النتائج بالهيكل المبني. يقتصر نطاق هذه الورقة على استنتاج نماذج الروبوت.
- وصف الموديل
يتم تقديم أربعة نماذج. يُظهر (الشكل 1) النموذج 1، والذي هو النموذج الروبوتي العادي في هندسة التحكم. يستند إلى مفهوم الناعمة المعكوسة التي تتأثر بالجاذبية، وفي هذه الحالة، تمت إضافة الزنبركات الدوارة والمباخر المركزة على الكتل المجتمعة، من أجل تمثيل صلابة وامتصاص الهيكل العمودي للمبنى (الأعمدة). يحاول هذا النموذج محاكاة روبوت مع سيرفوات دورانية في مفاصل الذراعين. من النموذج غير الخطي، يتم استنباط نموذج خطي ينظر إلى التدوير الصغير، النموذج 2 (الشكل 2) مشابه للنموذج 1، ولكن الزنبركات والمباخر ليست في الكتل المجتمعة، بل على رأسها. تحاول هذه الاختلافات الصغيرة تكرار سلوك الأعمدة في المبنى، التي تظهر تدويرًا غير مرن عند المفاصل المجاورة للألواح عند القرب من الأضرار، وليس داخل الألواح. أيضًا، يتم استنباط نموذج خطي من النموذج غير الخطي، النموذج 3 هو النموذج الهندسي الانشائي العادي للمباني ذات الارتفاع المنخفض (الشكل 3). تحتوي المباني الحقيقية على العديد من درجات الحرية، ولكن في الواقع يتم تبسيطها بالنظر في سلوك القص، أي أن التشوه الكلي للطابق يعود فقط إلى التشوه الجانبي والتشوهات الرأسية من التدويرات في قاعدة الأعمدة يتم تجاهلها. على الرغم من ذلك، يُعتبر تأثير الجاذبية من خلال تأثير ، وهو عزم من الدرجة الثانية يتم إنشاؤه بواسطة وزن كل مستوى عند التحريك أفقياً. من الهام أن نلاحظ أن النموذج المستمد لهذا النظام هو بالفعل خطي، وبالتالي، ليس هناك حاجة لخطه. النموذج 4 (الشكل 4) مشابه للنموذج 3 في جميع النواحي، باستثناء أن نظام الإحداثيات غير العام هو الذي يُستخدم، أي أن الإحداثيات المختلفة ليست مستقلة من تغيرات الإحداثيات الأخرى.
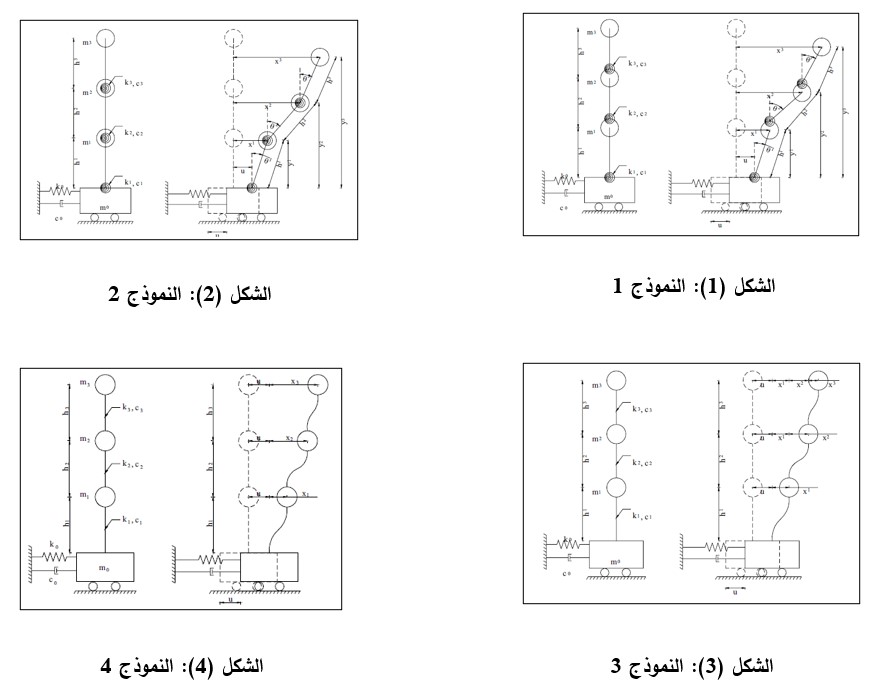
وأخيرًا، تمثل النماذج 3 و4 أيضًا نوع النماذج ذات الكتل المجتمعة المتصلة معًا من خلال الزنبركات والمباخر في ترتيب محوري أفقي، بحيث تكون قيم الصلابة والامتصاص متساوية تمامًا لتلك التي توفرها الأعمدة في كل طابق وبافتراض أن صلابة العوارض لا نهائية مقارنة بتلك الخاصة بالأعمدة، كما هو موضح في الشكلين 5 و6.

5- المحاكاة
لمراقبة أي من النماذج الروبوتية المطورة هو الأكثر ملاءمة، بحيث يتم تطبيق تقنيات كشف الأخطاء عليه، ولتمثيل سلوك بنية المبنى المعرضة لاهتزازات القاعدة بشكل أفضل، يتم تقديم المقارنات التالية. يتكون الهيكل من ثلاثة طوابق، ويتم محاكاة كل طابق بلوح بمساحة 3.00 × 3.00 متر وحمولة موحدة تبلغ 1.00 طن/م² تعمل عليه. تتصل الألواح معًا بواسطة عمود خرساني واحد بمقطع عرض 0.40 × 0.40 متر وارتفاع 3.00 متر لكل واحد. يتعرض كل نموذج لتشويش بادئ بمقدار 0.01 متر واهتزاز حر.
1.5 مقارنة بين النموذج 1 الخطي والنموذج 2 الخطي
يُظهر الشكل 7 الاستجابات لكل طابق دون تخميل من التسارعات الجانبية. يُعرض النموذج 2 بخط متصل والنموذج 1 بخط متقطع. يُلاحظ أن الاستجابات تختلف إلى حد كبير في المستوى 1، بينما يُلاحظ وجود توافق أفضل في المستويات 2 و3. على الرغم من ذلك، تحاول استجابة النموذج 1 متابعة استجابة النموذج 2، سواء في محتوى التردد أو في السعات، وربما إذا كان يجب تصفية استجابة النموذج 1، فإن الاستجابة ستتطابق بشكل مقبول مع استجابة النموذج 2.
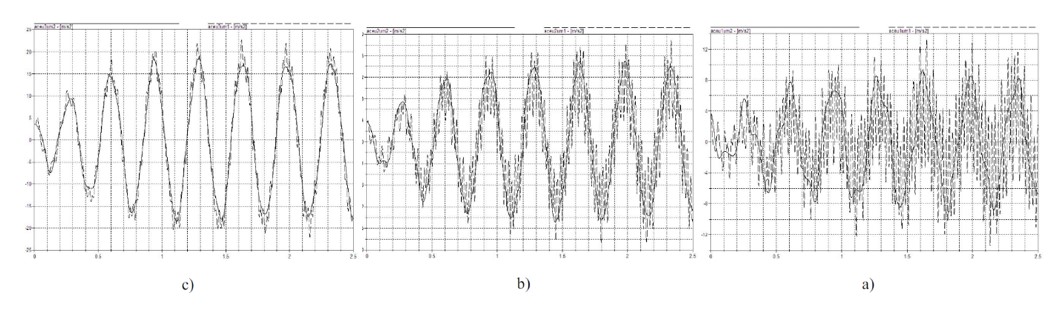
الشكل (7): استجابات المحاكاة للتسارع الجانبي بدون تخميل. (a) المستوى 1، (b) المستوى 2، و (c) المستوى 3.
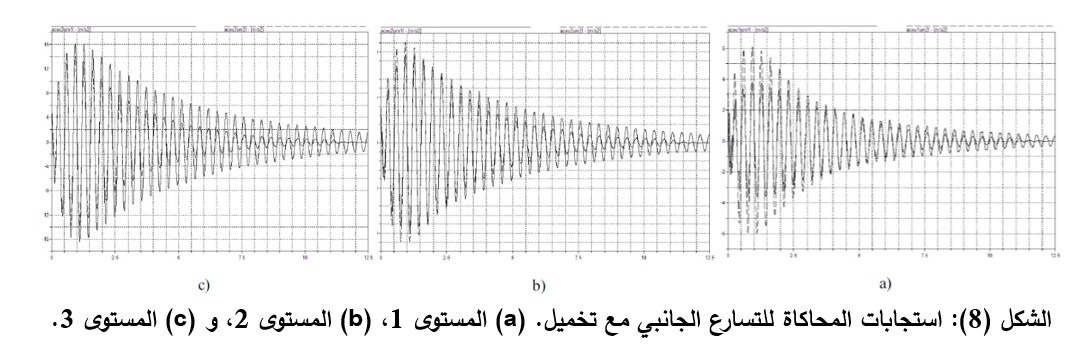
يُظهر الشكل 8 الاستجابة لكل مستوى مع تخميل طوري لتسارعات الجانبية. يُعرض النموذج 1 بخط متصل والنموذج 2 بخط متقطع. الفارق في السلوك كبير في جميع الطوابق. في المستويات 1 و2، يُظهر النموذج 1 أمبيراجات أصغر في بداية المحاكاة، وتتلاشى استجابة النموذج 2 بشكل أسرع من النموذج 1. في المستوى الثالث، يُعطي النموذج 1 دائمًا سعات أكبر من النموذج 2.
2.5 المقارنة بين النماذج 3 و4
يُظهر الشكل 9 استجابات التسارع المتطابقة تمامًا لكل من النماذج، وهو أمر واضح حيث أن الفارق الوحيد بين النماذج هو نظام الإحداثيات.
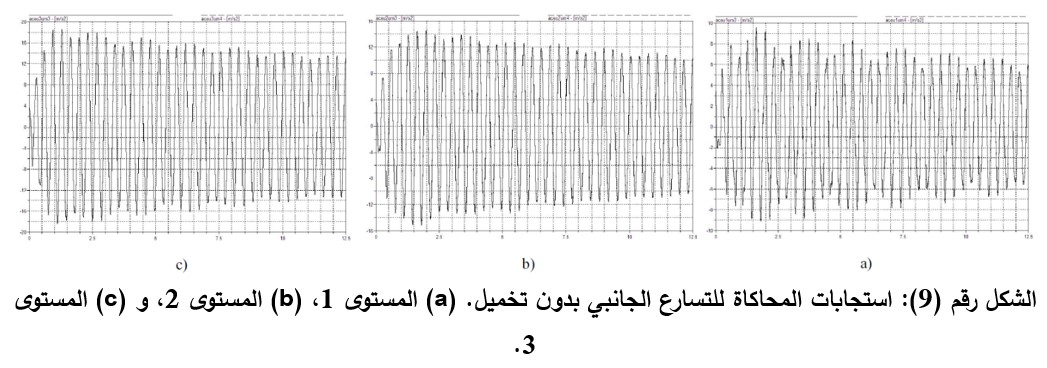
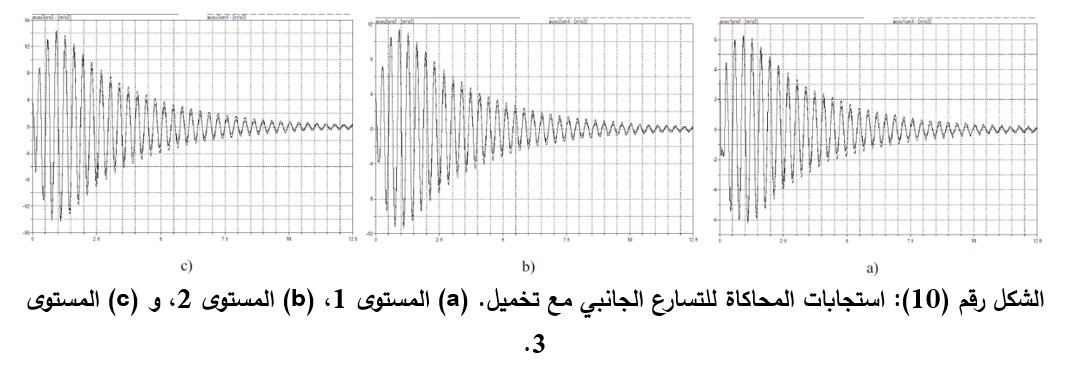
يُظهر الشكل 10 النموذج 3 بخط متصل والنموذج 4 بخط متقطع. يُمكن ملاحظة أنه مع التخميل الطوري، يُعطي النموذج 4 سعات أكبر من النموذج 3. في المستوى 1، الفارق حوالي 20% في المتوسط، بينما يزداد هذا الفارق إلى حوالي 30% في المتوسط في المستوى 3. من المهم بعد ذلك إشارة أهمية وجود هذا النوع من التخميل، لأنه في النظرية ينبغي أن يكون سلوك النموذجين هو نفسه تمامًا في وجود أي نوع من التخميل.
6 – نتائج المحاكاة
من الواضح أن استجابات النموذج 1 أكبر من نماذج بنية المبنى الخرسانية، على الرغم من أن الفروقات تُعتبر ضمن النطاق المقبول المسموح به في الديناميكا الإنشائية. يُظهر النموذج 2 مرة أخرى بعض الفروقات بين الإصدارات غير الخطية والخطية، حيث يتلاشى النموذج الخطي بسرعة أكبر من النموذج غير الخطي. النماذج 3 و4 هي خطية ولا تتطلب مزيدًا من الحسابات لتخطيطها خطيًا، وبالتالي لا يتم تقديم مقارنة بين الإصدارات غير الخطية والخطية.
حيث يمكن استخدام النماذج الخطية إذا كان الحث الداخلي صغيرًا، وتم ملاحظة استجابات مقبولة من وجهة نظر الديناميكا الإنشائية. من المهم دراسة سلوك النموذج 1 بتفصيل أكبر لتحديد بعض المعايير حول كيفية الحصول على معاملات الصلابة والتخميل، بحيث تسمح بالاقتراب من الاستجابات لبقية النماذج.
توافق استجابات النماذج 2 و3 و4 يسمح لنا بالاعتقاد بأن النموذج 2 مناسب لتمثيل سلوك بنية مبنى خرساني منخفض الارتفاع.
المحاكاة كما هو مقدم هنا تعتبر فقط الاهتزاز الحر، مما يفتح الباب لمقارنات أخرى تعرض النماذج لأنواع مختلفة من الحث الداخلي، مثل الوظائف المنتظمة أو السجلات الزلزالية.