
الأستاذ المشرف
الدكتور المهندس أحمد رياض كردي

اعداد الطالب
علي وائل زيد
ملخص:
ساهم تطور التكنولوجيا في عالم السيارات في تغيير طريقة قيادتنا للسيارة وفي فتح أبواباً واسعة للابتكار، فقد شهدت صناعة السيارات في العقود الأخيرة تحولاً هائلاً في مجال تطوير التكنولوجيا الذكية والقيادة الذاتية، إذ تسعى الشركات المصنعة إلى تحقيق مستوى جديد من الأمان والكفاءة والراحة عن طريق استخدام تطبيقات الذكاء الاصطناعي في مجال القيادة الذاتية والمركبات الذكية.
- مقدمة:
يعتمد الذكاء الاصطناعي في السيارات ذاتية القيادة على وحدات استشعار وكاميرات عالية الدقة، حيث يتم تصوير البيئة المحيطة بالمركبة أثناء حركتها، مما يساعد في تسجيل كافة البيانات المتعلقة بظروف الطريق والسرعة وزوايا الإطارات ودرجة الرؤية والمناخ العام، كما أن تطبيقات الذكاء الاصطناعي تتحكم في القرار المناسب الذي تتخذه السيارة الذكية استنادًا إلى هذه البيانات و عندما ترصد هذه المنظومة المتطورة أي احتمالية لحدوث موقف خطير والذي من الممكن أن يؤثر سلبًا على حياة السائق، تقوم بتحذيره مسبقًا للتدخل في الوقت المناسب[3].
يمكن أن يكون للذكاء الاصطناعي فوائد اجتماعية لا حصر لها، لكنه في الوقت نفسه قد يسبب الضرر، إن شرط الحماية المناسبة للمستهلكين هو أنه قبل إدخال التكنولوجيا الجديدة إلى جانب إعداد البنية التحتية للطرق والبنية التحتية القانونية، يتم أيضًا مراجعتها وتعديلها [4].
- الوسائل التي تولد بها السيارات ذاتية القيادة بياناتها:
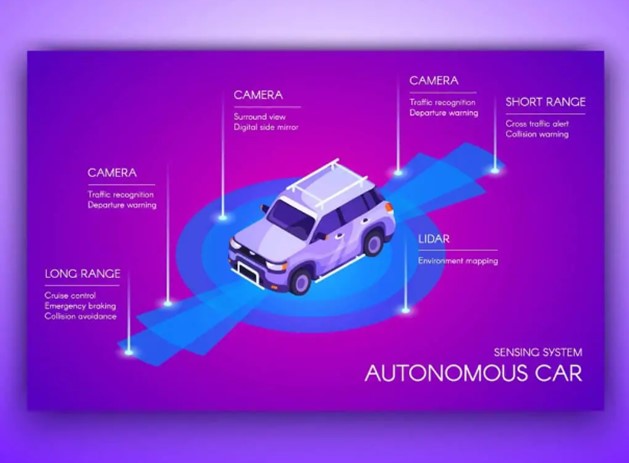
يجب على تقنية الذكاء الاصطناعي المستخدمة في المركبات ذاتية القيادة أن تكون قادرةعلى التعامل مع الحساسات الموزعة حول المركبة ومعالجة الصور ضمن محيط المركبة ، ويتم تحقيق ذلك باستخدام الكاميرات والرادار و LIDAR، إذ أنه بمساعدة هذه المستشعرات والكاميرات المثبتة في أجزاء مختلفة من السيارة ، يستمد الذكاء الاصطناعي المعلومات التي يمكن من خلالها اتخاذ القرارات، فيما يلي أهم الأجزاء للنظام المستخدم في السيارة ذاتية القيادة مع الدور الذي تلعبه في جمع البيانات للسيارات ذاتية القيادة.
1.2- أجهزه الاستشعار
تراقب المستشعرات موضع المركبة ومدى قربها من المركبات الأخرى والمشاة والأشياء الموجودة على الطريق، المستشعران اللذان تستخدمهما المركبات ذاتية القيادة هما الكشف عن التصوير الضوئي وتحديد المدى (مستشعر LIDAR) والكشف عن الراديو وتحديد المدى (مستشعر الرادار).
يقيس مستشعر LIDAR المسافات ويحدد مكونات الطريق، مثل علامات الطريق والحواجز عن طريق ارتداد نبضات ضوء الليزر عن محيط السيارة.
يستخدم مستشعر الرادار نفس مبادئ مستشعر LIDAR باستثناء أنه يستخدم موجات الراديو، حيث يحتوي على جهاز إرسال الموجات الكهرومغناطيسية، وهوائي للاستقبال والإرسال،إضافة إلى معالج يحدد خصائص الأشياء، وجهاز استقبال، عندما تنعكس موجات الراديو من جهاز الإرسال عن الكائن يتم إعادتها بعد ذلك إلى جهاز الاستقبال ثم استنتاج المعلومات حول الكائن بواسطة المعالج.
ومع ذلك، وبغض النظر عن التحسينات العديدة في تقنيات دمج أجهزة الاستشعار، فقد وجدت الأنظمة القائمة على الرؤية/LIDAR صعوبات شديدة أثناء الإدراك على الطرق.[5]
2.2- الكاميرات
تعرف الكاميرات أيضا باسم مستشعرات الصور في المركبات ذاتية القيادة، إذا تقوم بكشف الأشياء وتحديدها وتصنيفها، لتحديد المسافة بين السيارة والجسم.
قد تسمح الكاميرات وأجهزة الاستشعار للسيارة “برؤية” محيطها، لكن هذه القدرة البصرية ستكون عديمة الفائدة بدون توضيح وتحيلي البيانات حيث يعد تحليل البيانات جزءاً مهماً من مشاريع الذكاء الاصطناعي السيارات لأنه يسمح بتحديد الكائنات، فكلما زادت جودة تحليل البيانات، زادت دقة تقنية الذكاء الاصطناعي وقلت فرص التعطل.[4]
3.- خوارزميات التعلم الآلي التي تستخدمها السيارات ذاتية القيادة:
يمكن استخدام العديد من خوارزميات التعلم الآلي في السيارات ذاتية القيادة والتي يمكن تصنيفها جميعاً في واحدة أو أكثر من الفئات التالية:
- خوارزميات الانحدار: جيدة في التنبؤ بالأحداث من خلال تقييم العلاقة بين متغيرين أو أكثر ومقارنة تأثيراتها على مقاييس مختلفة.
- خوارزميات مصفوفة القرار: تحلل وتحدد وتقيم أداء العلاقة بين مجموعات القيم الواردة من الحساسات والكاميرات الموزعة.
- خوارزميات التعرف على الأنماط: تعرف أيضاً باسم خوارزميات التصنيف، حيث يتم التعرف على الأنماط بين مجموعات البيانات وتصنيفها.
- خوارزميات الكتلة : يتم فيها اكتشاف البنية من نقاط البيانات في الحالات التي لا يكون فيها من السهل اكتشاف الصورة التي تم الحصول عليها أو لم يتم تصنيفها بواسطة خوارزمية التعرف على الأنماط.
من بين آلاف الخوارزميات المتاحة في كل فئة من هذه الفئات ، هناك خمس خوارزميات تظهر أكبر الامكانيات للسيارات ذاتية القيادة:
- SIFT (تحويل ميزة ثابتة على نطاق واسع) لاستخراج الميزة:
هذه الخوارزمية هي خوارزمية للكشف عن الميزات، تستخدم لاكتشاف النقاط الرئيسة ووصفها ومطابقتها في صورة (كائن) مرئي جزئياً، ثم يتم استخدام هذه النقاط الرئيسة لتحديد الصورة (الكائن) المعني.
- AdaBoost لتصنيف البيانات:
يتم استخدام خوارزمية AdaBoost كخوارزمية انحدار وكخوارزمية تصنيف، ولكن التركيز في هذا السياق سيكون على AdaBoost كخوارزمية تصنيف، لاستخدامها في تصنيف البيانات ، حيث يتم جمع وتصنيف البيانات لدعم عملية التعلم الذكاء الاصطناعي للمركبة، يعمل AdaBoost على تحسين قدرات اتخاذ القرار في الذكاء الاصطناعي من خلال تجميع بيانات المصنف منخفضة الأداء للحصول على بيانات عالية الأداء.
- TextonBoost للتعرف على الكائنات:
تشبه خوارزمية TextonBoost في الأداء خوارزمية AdaBoost من حيث أنها تجمع بين المصنفات منخفضة الأداء للحصول على مصنف واحد عالي الأداء، يكمن الاختلاف الرئيسي بين TextonBoost و AdaBoost في أن الأول يمكنه تفسير البيانات المتعلقة بالمظهر والسياق والشكل، من خلال الجمع بين هذه المصنفات الثلاثة، يمكن لخوارزمية TextonBoost التعرف بدقة أكبر على الصور والكائنات.
- الرسم البياني للتدرجات الموجهة (HOG):
HOG هو واصف ميزة تماماً مثل خوارزمية تحويل الميزة Scale Invariant من حيث أنه يستخدم لاكتشاف الكائنات، حيث يحلل موقع الصورة (الكائن) لتحديد كيفية تحركه، ثم يقوم بتقسيمها إلى خلايا ويحسب كل خلية إلى مدرج تكراري للتدرجات الموجهة، ويقوم بتطبيع النتيجة، وإرجاع واصف لكل خلية.
على الرغم من أن HOG لا تعتبر خوارزمية تعلم آلي تماماً لأنها غير مرتبطة بخوارزمية معينة ، إلا أنها لا تزال مفيدة جدا في التعلم الآلي.
- YOLO (أنت تنظر مرة واحدة فقط): هي خوارزمية تعلم آلي تعتمد على خوارزمية الانحدار، وتستخدم لتحديد الكائنات وتجميعها، تكتشف خوارزمية YOLO الكائنات في خط رؤية الذكاء الاصطناعي وتقسمها إلى مجموعات، ثم تقوم بتحديد ميزات محددة لكل مجموعة من الكائنات التي تم بتجميعها، مما يسهل على الذكاء الاصطناعي التعرف عليها.
وهناك أيضاً العديد من خوارزميات التعلم الآلي الأخرى المستخدمة في السيارات ذاتية القيادة مثل K-means، وتحليل المكونات الرئيسية، وآلات دعم المتجهات ، والمزيد. بغض النظر عن الاستخدام ، فإن خوارزميات التعلم الآلي تجعل السيارات ذاتية القيادة تنبض بالحياة. بدون دمج هذه الخوارزميات ، لم تكن الذكاء الاصطناعي السيارات ممكنة.[5]
4- تطبيقات الذكاء الاصطناعي في مجال القيادة الذاتية والمركبات الذاتية:
يمكن أن يساهم الذكاء الاصطناعي في تحسين تجربة الركاب في المركبات الذكية والقيادة الذاتية، يمكن للذكاء الاصطناعي التعرف إلى الوضعية المفضلة للركاب وتوفير تجربة مخصصة ومريحة، مثل التحكم في نظام الترفيه والمعلومات وتكييف الهواء وغيرها من المرافق داخل المركبة الذكية وذلك عبر مجموعة من التطبيقات أهمها:
1.4- نظام المساعدة في القيادة الذاتية (ADAS):
يستخدم الذكاء الاصطناعي لتطوير أنظمة القيادة الذاتية التي تهدف إلى تمكين المركبة من القيادة الآلية دون التدخل البشري الكامل، هذا النظام يعمل على مساعدة السائقين على القيادة الآمنة والفعالة بالاعتماد على مجموعة متنوعة من الاستشعارات مثل الرادارات والكاميرات وأجهزة استشعار الأشعة تحت الحمراء والمجسات الأخرى من أجل التعرف إلى إشارات المرور والتحكم في المساروالتحكم في المسافة بين المركبات والتنبيه من خطر التصادم.
2.4- القيادة الذاتية الكاملة:
تهدف هذه التطبيقات إلى تحقيق القدرة الكاملة للمركبة على القيادة من دون تدخل بشري، ويتضمن ذلك التعامل مع مختلف الظروف الطرقية واتخاذ القرارات الملائمة للتنقل والتفاعل مع المركبات والبنية التحتية المرورية الأخرى.
3.4- خدمات توصيل الطرود الذاتية:
يمكن استخدام الذكاء الاصطناعي لتطوير مركبات ذاتية القيادة لتوصيل الطرود والشحنات، وتستخدم هذه التطبيقات تقنيات الاستشعار والتخطيط والملاحة لتحقيق تسليم سريع وأمن.
4.4- نقل الركاب الذاتي:
يهدف هذا التطبيق إلى تحقيق نقل الركاب من دون سائق، فيستخدم الذكاء الاصطناعي في قيادة المركبات وتحسين تجربة الركاب من حيث الأمان والراحة.
5.4- تحليل البيانات المرورية:
يستخدم الذكاء الاصطناعي في تحليل البيانات المرورية والتنبؤ بحركة المرور وتوجيه السائقين إلى المسارات الأكثر فاعلية وتجنب الازدحام. [5]
5- الجوانب الإيجابية والسلبية للسيارات ذاتية القيادة:
تتمتع السيارات ذاتية القيادة بالقدرة على تحقيق العديد من الفوائد ، ولكن هناك أيضا بعض التحديات التي يجب معالجتها قبل أن تنتشر على نطاق واسع.
1.5- الجوانب الإيجابية:
- تقليل الحوادث:تتمتع السيارات ذاتية القيادة بالقدرة على تقليل عدد الحوادث الناجمة عن الخطأ البشري بشكل كبير، ما قد يؤدي إلى عدد أقل من الوفيات والإصابات على الطريق.
- تحسين تدفق حركة المرور: يمكن للسيارات ذاتية القيادة تحسين تدفق حركة المروروتقليل الازدحام من خلال التواصل مع بعضها البعض واتخاذ قرارات في الزمن الحقيقي لتحسين مساراتها وسرعاتها.
- زيادة الحركة:يمكن للسيارات ذاتية القيادة أن تزيد من حركة الأشخاص غير القادرين على القيادة بسبب العمر أو الإعاقة أو عوامل أخرى.
- الفوائد البيئية:يمكن للسيارات ذاتية القيادة أن تقلل من استهلاك الوقود والانبعاثات، ما قد يكون له أثر إيجابي على البيئة.
2.5- الجوانب السلبية:
- مخاوف الموثوقية والسلامة:هناك مخاوف بشأن موثوقية وسلامة السيارات ذاتية القيادة، خاصة في مواقف القيادة المعقدة أو غير المتوقعة.
- فقدان الوظيفة:يمكن أن تؤدي السيارات ذاتية القيادة إلى فقدان الوظائف للسائقين البشريين، مثل سائقي سيارات الأجرة والشاحنات.
- القضايا الأخلاقية والقانونية: هناك قضايا أخلاقية وقانونية يجب مراعاتها، مثل كيفية ضمان سلامة الركاب والمشاة وكيفية التعامل مع المسؤولية في حالة وقوع حادث.
- مخاطر الأمن السيبراني:يمكن أن تكون السيارات ذاتية القيادة عرضة للهجمات الإلكترونية، ما قد يعرض سلامتها وخصوصيتها للخطر.[6]
6-الخلاصة:
لقد غيرت تطبيقات الذكاء الاصطناعي في مجال المركبات الذكية والقيادة الذاتية من طريقة تفكيرنا وتفاعلنا مع السيارات، فقدمت تقنيات الذكاء الاصطناعي إمكانات هائلة لتحسين السلامة والكفاءة وتوفير تجربة قيادة فريدة ومريحة، وكما قال العالم الفيزيائي الشهير ستيفن هوكينج: “ربما يكون الذكاء الاصطناعي الحد الأكبر في تطوير الحضارة منذ اختراع النار فقد يحمل الذكاء الاصطناعي القدرة على تعزيز قدراتنا وتحسين حياتنا بشكل لا يمكن تصوره، فهذه الكلمات تعكس أهمية وتأثير تطبيقات الذكاء الاصطناعي في تقنيات المركبات الذكية والقيادة الذاتية وما يزال الطريق إلى تحقيق القيادة الذاتية بالكامل طويلًا ويحتاج إلى تجارب واختبارات مكثفة وتحسينات مستمرة، لكن مع التزايد السريع القدرات التكنولوجيا والاستثمارات المتزايدة في هذا المجال، فإننا ننظر إلى مستقبل مشرق تصبح فيه المركبات الذكية والقيادة الذاتية جزءاً لا يتجزأ من حياتنا اليومية.